
Data-driven stochastic optimal control
Kernel-based stochastic optimal control
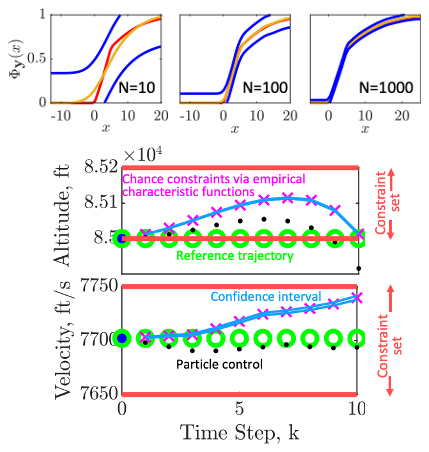
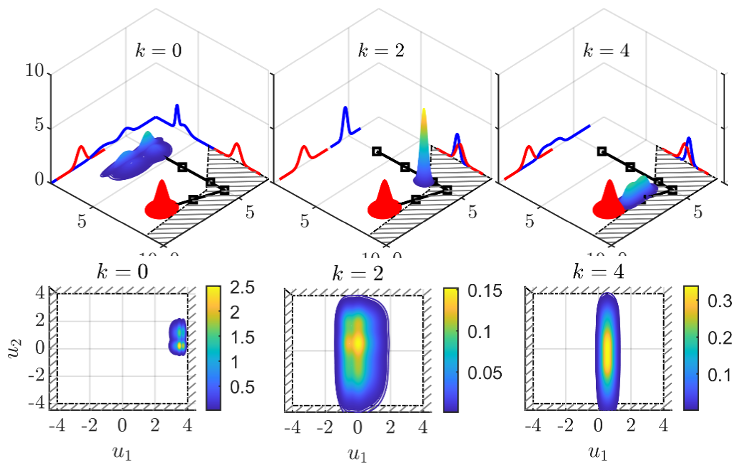
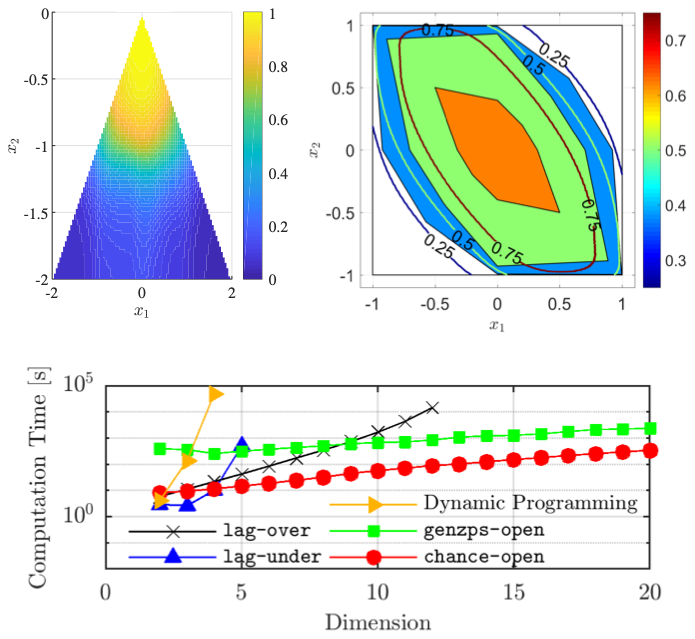
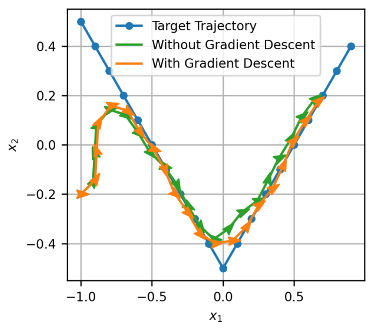
We use mathematical tools from functional analysis and statistical learning theory to solve data-driven stochastic optimal control problems Our methods are based in a non-parametric learning technique, conditional distribution embeddings, which exploit properties of reproducing kernel Hilbert spaces. This approach enables efficient controller synthesis, including via gradient descent and other methods, within the Hilbert space, that can be solved efficiently as a linear program.
Characterizing human heterogeneity in human-in-the-loop systems
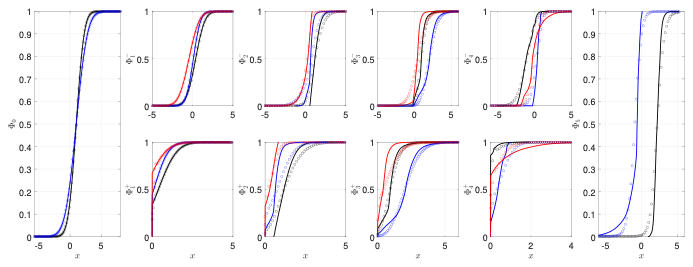
Investigation of human driving characteristics plays a pivotal role for modeling and control of human-automation systems. As autonomy becomes pervasive, methods that can effectively characterize individual driver behavior will become paramount to ensure efficiency, safety, and high levels of performance. We have developed a non-parametric modeling framework based on kernel embeddings of distributions for the purpose of personalized characterization. Future work will incorporate such characterization for controller synthesis.
Group dynamics in learning environments
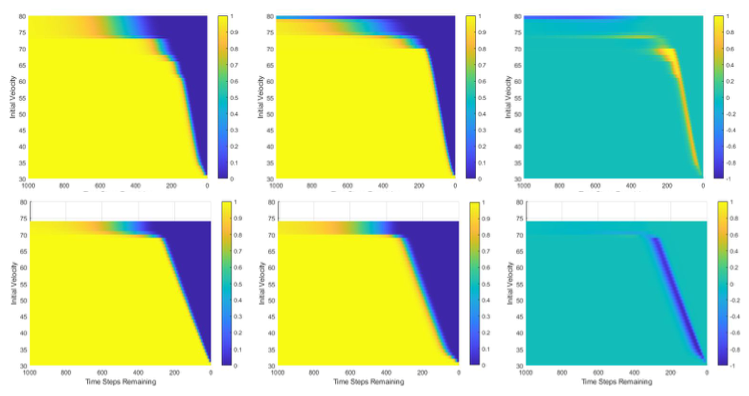
Understanding how to engage students in open-ended engineering design problems is a common problem for instructors of engineering. We utilize data-driven stochastic reachability techniques to analyze data on the agency and engagement of design students in group settings based on student conversations. We aim to enhance the understanding of instructors to enable teaching interventions to optimize student engagement.
Characterizing voids in laser deposition based additive manufacturing
Directed energy deposition (DED) is a laser and powder-based metal additive manu- facturing process with a high degree of variability between printed parts, even under identical manufacturing conditions. This process has proven difficult to control due to lack of accurate mathematical models to fully describe it. Our work in this area aims to enable future control of DED processes by using data-driven reachability analysis and neural networks to provide likelihood metrics of internal flaw formation in DED parts.